��������X�F���t�Ŀ���ϵ�y(t��ng)���OӋ�_�l(f��)
1���Cеϵ�y(t��ng)����c�Ϳ���ϵ�y(t��ng)���w����
������������F����ˇ���f���F���t����Ҫ�ăɂ���������ն��ͼӟ����ܣ��Cеϵ�y(t��ng)��늚����ϵ�y(t��ng)���LJ��@���@�ɂ����܁��M���OӋ�����ˌ��F(xi��n)�F���t�Ĺ��ܣ��@�ɴ�ϵ�y(t��ng)���ܲ��ɷֵġ��O������c�����O��ęCеϵ�y(t��ng)�к�늚�������P���c��Ҳ���ǙCеϵ�y(t��ng)��늚����ϵ�y(t��ng)�ĽY���c����1 �R����ԓ�O����P�I����c��
���������@�_�O��ęCеϵ�y(t��ng)��������PLC����ĵ�늚����ϵ�y(t��ng)��늚����ϵ�y(t��ng)�����w���ֿ��ɈD2���f����

�D2 ����ϵ�y(t��ng)�����w����
����늚����ϵ�y(t��ng)���Է֞�ɲ��֣��ضȿ��Ʋ��ֺ�߉���Ʋ��֣��ضȿ�����Ҫ�ɿر�����(Ҋ��1�͈D2) ��߉���Ʋ�����PLC ����ɣ���λ�C�ϵĽM�B(t��i)ܛ���������O(ji��n)�ؽ��档늚�ϵ�y(t��ng)���_�l(f��)�^�̷֞�Ӳ��ϵ�y(t��ng)���_�l(f��)��ܛ��ϵ�y(t��ng)���_�l(f��)��Ӳ���OӋ��Ҫ�����ӟ��·����ձ���·���\��܇��·�̓x�����x�͵ȡ�
��1 �Cеϵ�y(t��ng)��늚�ϵ�y(t��ng)�P�I�ĽY���c

�����ӟ��҃�(n��i)���S��ӟ�С�^(q��)���ڿ���ϵ�y(t��ng)�ļӟ��·�У���ÿ���ӟ�С�^(q��)��늵���һ�ɿع��{(di��o)���Դ���ɿع��{(di��o)���Դ�������ʿ�������׃�����ɲ��֣����ʿ��������������|�l(f��)�ķ�ʽ�팍�F(xi��n)늉��ğo���{(di��o)��(ji��)���Ķ��_�����ƹ��ʵ�Ŀ�ġ�ݔ��늉����{(di��o)��(ji��)�������^����һ����~��ݔ��늉���0 �� 98%������ܛ���ӡ�ܛ�P�ࡢ�������������^�����o���^�ᱣ�o�ȹ��ܡ�ÿ���ӟ�С�^(q��)�и��Ԫ�����һ�ɿع��{(di��o)���Դ���ɿع��{(di��o)���Դ��׃����ԭ߅����늾W(w��ng)����߅�ɠt�w늘O�B�Ӹ����ӟ�С�^(q��)����衣�{(di��o)���Դ��ݔ�����ʵ��{(di��o)��(ji��)��ʽ�֞��ք��{(di��o)��(ji��)���Ԅ��{(di��o)��(ji��)���ք�/�Ԅӿ�ͨ�^���ƹ��ϵ��D(zhu��n)�Q�_�P���ГQ�����Ԅ��{(di��o)��(ji��)�Ġ�B(t��i)�£��ӟ���ƞ��]�h(hu��n)���ƻ�·���؟��ż�ɼ��t��(n��i)�ӟ�С�^(q��)�Ĝضȣ��ض���̖�D(zhu��n)����ģ�M����̖ͨ�^���ż�a����������ر��ğ�ż����ˣ�ͨ�^�ر��еĹ�ˇ����̎���ͱ������e�֡���(proportion��integral��differential) ����������4 �� 20 mA ������̖����ɿع��{(di��o)���Դ���Ԅӿ�����̖��ݔ��ˣ��Դˁ��{(di��o)��(ji��)����ݔ�����ڿ��ƹ�������O���и��ӟ�^(q��)�ļӟ������늉��@ʾ���Լ��������քӲ����ӟṦ���{(di��o)��(ji��)���o���������քӲ����r�{(di��o)�������ӟ�^(q��)�ļӟṦ�ʡ��������ż���ɼ���̖ͨ�^�ضȲɼ�ģ�K��ģ�M���D(zhu��n)�Q�ɔ�(sh��)��������Ӌ��Cϵ�y(t��ng)�����F(xi��n)�������ضȵČ��r�O(ji��n)�ء�
������ձû�·��Ҫ�����ϵ�y(t��ng)��5 ����ՙC�M�����бõ�늙C��늣�������늻�·�Ŀ��_��һ�����_�|�c����PLC ��ݔ��ģ�K������õĿ��_�ԙz�c����ձü�����y�T�Ą���Ҳ�֞��քӺ��Ԅӿ��ƣ�Ҳ��ͨ�^���ƹ��ϵ��D(zhu��n)�Q�_�P���ГQ�����ƹ��ϵĸ����ú��y�T���_�P���o����PLC ��ݔ��ģ�K�У�ͨ�^PLC �ij���̎���ݔ���������ú��y�T���\����̖���_�P��̖�������ϵ�y(t��ng)���Ã��_�p·��(sh��)�@���Ӌ���y����·ϵ�y(t��ng)(�����) �͠t��(n��i)���(�Ĵ��O����նȵ�ȫ���̜y��) ����ͨ�^�ɾ���������������_�ı��c���y�_���c�t��(n��i)��ն�(li��n)�i����ÿ�יC�M��ǰ���ܵ��ϣ��քe���b�����Ҏ(gu��)�ܽӿڣ����ڜy����չܵ�����նȣ��ڠt�w픲���ÿ�״��y�c�t�w֮�g���B�ӹܵ��ϣ��քe���b���ת����IJ������Ҏ(gu��)�������ڱO(ji��n)�y�t��(n��i)��նȡ�
�����\��܇��·��Ҫ���\��늙C��늣�ͨ�^���늴��y�������_�P���г��_�P���^����ȴ�Ŀ��ƻ�·�M�п��ơ�
2��PLC��ݔ�롢ݔ���c��(sh��)�Ĵ_���Լ��x��
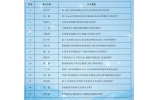
�������ȸ���(j��)ϵ�y(t��ng)�Ŀ��w���ֺ�Ӳ��ϵ�y(t��ng)���OӋ���_��PLC ��ݔ��ݔ���c��(sh��)��ݔ��ݔ����̖��ͣ�PLC ݔ���c��Ҫ���_�P����̖���������ױú��y�T���_�P��̖���y�T�_�P��λ��̖���t��܇���t�T܇�M�˵�λ��̖���ӟ�ͨ����̖����/�Ԅ��D(zhu��n)�Q��̖���Ԅӆ����_�P��̖����sˮ����̖���ӟᳬ����̖���ӟ��^����̖�������Ӌ�O���ĸ��ú��y�T�Ć��ӱ��o��̖�Լ��Uɢ���ͳ�����̖�ȣ�ݔ���c��Ӌ165 �c��PLC ݔ���c��Ҫ���^���ݔ�����������ü��y�T���|����Ȧ����^(q��)�ӟ�ͨ����|����Ȧ���⏰l(f��)Ӎ�����Q���ȣ���Ӌ47 �c��
�����ڝM��ʹ�õ�ǰ���¿��]��(j��ng)�����x���ձ��Wķ����PLC���Wķ����CQM1H ��PLC �������ƶ��Ҿo����������Windows �h(hu��n)���µĸ�Ч��ܛ���_�l(f��)������Windows ���CX-Programmer ֧��ܛ�����Ԝp��ܛ���_�l(f��)�r�g�����ṩ����ıO(ji��n)�غ��{(di��o)ԇ���ܡ�������Ԫģ�KҪ����(j��)PLC ���H��ݔ�롢ݔ���c���x�����ȸ���(j��)ݔ����c��(sh��)�x��6 ��32 �c��ݔ���Ԫ����̖��CQM1H-ID213��������Ğ�(5V ֱ��) ���170 mA; Ȼ�����(j��)ݔ���c��(sh��)��ݔ���c������x��3��16 �c�^���ݔ����Ԫ����̖��CQM1-OC222����(n��i)��������Ğ�( 5 V ֱ��) ���850 mA;��������(j��)����ݔ�롢ݔ���c��(sh��)�Լ�ݔ�롢ݔ��ģ�K�Ĕ�(sh��)���x��CPU ��Ԫ����̖��CQM1H-CPU51����ݔ�롢ݔ��������512�c������������7.2 K �֣����ɔUչ11 ��ݔ�롢ݔ����Ԫ;������(j��)������������x���Դģ�K����̖��CQM1-PA206�����ԴҎ(gu��)���100 �� 240 VAC�� 50 /60 Hz��ݔ������5VDC��6 A�� 24VDC��0.5 A��
3��PLC ����
��������CX-Programmer ����ܛ������֮ǰ������Ҫ��������F���tPLC�����F(xi��n)�Ŀ��w���ƹ��ܣ��L�����̈D(�D3���O��������̈D) ��
�D3 �������̈D

�����L�ƿ��w���̈D����(j��)���،���ݔ��(����ż) ��ݔ����̖(����ƹ̑B(t��i)�^������}�_) �Լ����x����PLC ��̖����Ӳ���YԴ�������ΈD�ĸ��N�^늻���c�M�о�̖����F(xi��n)�����ֿ��ƹ��������ΈD�M�о��̡����ΈD�ľ����܉�?q��)��F(xi��n)����������t�IJ����⣬����������ͨ�^�Ԅӳ�����ɣ�Ҳ��ͨ�^�քӲ�����ɣ����Ɍ��F(xi��n)��Ҫ�ı��o�͈��ܡ�