�{���y��ӌ��y������Ӱ푵Ĕ�ֵģ�M
�����{���y��ӆ��}�ڸ߅�����݆�C���ձ���ڣ��ч���Ӱ푵��C�M�\�еĽ����ԺͰ�ȫ�ԡ��{���y��Ӟ���s��������ϣ�������ֵģ�M��ʾ�����w�T�l��ӵ�ԭ����u�ɞ���Ҫ���ֶΣ�����Ŀǰᘌ��{���y�Ĵ֔�ֵģ�M��δ���]�y�Uϵ�y��ӌ��y��������Ӱ푡�
�����{���y��ӆ��}�ڸ߅�����݆�C���ձ���ڣ��ч���Ӱ푵��C�M�\�еĽ����ԺͰ�ȫ�ԡ��{���y��Ӟ���s��������ϣ�������ֵģ�M��ʾ�����w�T�l��ӵ�ԭ����u�ɞ���Ҫ���ֶΣ�����Ŀǰᘌ��{���y�Ĵ֔�ֵģ�M��δ���]�y�Uϵ�y��ӌ��y��������Ӱ푡�ԓ���ڔ�ֵģ�M������Fluent�ЄӾW��ģ�K��UDF���������ȷ������y�����oֹ�Ͳ�ͬ���������l�����y��������Ӱ푡��ھW��׃����ʹ����һ�N�·f�ľW����Ʒ��������̶��y��߅��ӾW��ʹ�W�����^��߶ȅ^��׃�Σ��_���˔�ֵӋ��ʴ_��������M�С���ֵӋ��Y���������y��픶����С��0.6mm�r���y���ω����ʬF�S�C����;���y��픶������1mm�r���y���ω����S�y���Ƅӳ��F���@�������Բ��ӣ��˕r��ֵģ�M�����]�y�Uϵ�y��ӵ�Ӱ푡��S������l�ʵ����ӣ��y���������Եĉ���������u�������y���Ƅӣ����l���_��193.6Hz�r�����Բ�����ʧ��
�����{���yλ���������ܵ�����݆�C֮�g���ǿ��ƙC�M���ʵ���Ҫͨ���������S���C�M�ΙC�������Ӻ�������������ߣ���݆�C�{���y��̎�ژO�����Ĺ��r�h���У������w�T�l�{���y��������a�����¹ʌ�Ҋ���r���ѳɞ����{늏S��ȫ�\�е���Ҫ���ء��S��CFD�IJ���lչ�����ƣ���ֵӋ�����䷽���ԺͿ�ҕ���ȃ��c�ܵ��˱����W����A���ڷ������w�T�l���{���y����а���Խ��Խ��Ҫ�Ľ�ɫ������ռ��g�W(http://m.203scouts.com/)�J�������{���y�����һ�N���s�����S������ϬF��Ŀǰ��ֹ����ԓ���}�ęC��ʼ�K�]�����_��Փ�ࡣ
����Araki�J�鮔�{���y���y�Uϵ�y�������С�_�ȕr��һ�A�v����l��ӣ����_����u�������Ҫ��һ�A������ӡ�Zhangͨ�^���S������ֵģ�Mָ���y�Ȳ����Q����������ӵ�����Morita�����S�Ƕ�����ֵģ�M�Mһ�������y���·��߉��^�������Ƅӌ������y�Uϵ�y����ӡ�Morita߀ͨ�^����о����y�U�����B���µĉ������Ӻ���ӵ��Pϵ��ָ�����е����̕r�������Ӻ��y�����l��֮�g�����i���F�����i���^������Ƚӽ�����������^���ڷ��i���^������ȴ���5%��Teczaͨ�^����Ԫ���_�����y�Uϵ�y�Ĺ����l�ʣ���ָ���y�����п��ܵ��\�Ӟ�Aб�͔[�ӣ��������y�U�[���l��550Hz���[�ӽǶȞ�±0.02°�M����˲�B��푑�������Yonezawa���о������y�����`���B�µĉ������Ӹ����y���o�̕r�IJ��ӣ����y�Uϵ�y����ӷ֞���ӷ�ֵ�^С�r�ď�����Ӻ���ӷ�ֵ�^��r���Լ���ӡ������P���{���y�Ĕ�ֵӋ���о����������]�y�Uϵ�y��ӵ�Ӱ푣��Ô�ֵģ�M�����{���y���y�͌���ӡ����������p�����͵����ص�Ӱ푣������{���y���P���_�������в��ò����]�y���Ƅӣ����ÄӾW��Ӌ���y�ȵ�˲�r������׃����������Ӌ���^�������ھW���׃�^�������Ӌ��lɢһֱ�����_��ֵӋ���ܷ�����M�е��P�I���ء�ͨ�^���ӾW��߶ȜpС�W���׃������Ч���������Еr߀����W��߶��^���Ӱ�Ӌ��ʴ_�ԡ�
�������@Щ�о����Կ�������������CFD�����y�ȵ����ͼ����w�T�l���{���y�y�Uϵ�y��Ӵ�����ӌ��y��������Ӱ푡�������ӷ�ֵ�^��r����Ȼ�����Ȳ������Įa��Ӱ푡�����ᘌ����φ��}������Fluent�еď��ɹ��ģ�ͺ�UDF���������ȷ�����ij600MWģ���{���y���y��픶�����քe��0.6mm��1mm��������l�ʷքe��46.4��92.8��185.6Hz�r�y�Uϵ�y��ӌ��y��������Ӱ푡�Ӌ��������ı��o߅��ӵľW��׃�������͔�ֵӋ��Y������m��ֵӋ���оW����ƺ��Ƿ]�y�Uϵ�y��ӌ��y��������Ӱ��ṩ����Ҫ�ą�����
1����ֵӋ�������ģ��
������������ԭ�팦ij늏S600MW�{���y�M����ģ�����D1��ģ�����{���y���M�ڷ������Ľ���ʾ��D���y�U���y�����M�ɵ�ϵ�y�ɿ������������C���c�y�U�B��̎��̶��c��픶ˎ��м����|�����L�����Y��[3]�������{���y���е������£��y���ω������ӳʬF�Ե��lռ���Č��l�������ԣ�������Ҫ���]�y�U�y�����M��ϵ�y��һ�A����ģ�B���y��������Ӱ푡�����WorkbenchӋ����{���y�y�Uϵ�y�����l�ʣ��Y���������{���y�y�Uϵ�yһ�A���صĹ����l�ʞ�46.4Hz���錦���y�Uϵ�y����һ�A��������ڲ�ͬ����l�����y��������Ӱ푣�Ӌ�����l�ʷքe��һ�A�����l�ʼ�2����4��һ�A�����l��(���l�ʷքe�飺46.4��92.8��185.6Hz)�@3�N�������錦�Ȳ�ͬ��ֵ���y��������Ӱ푣�Ӌ�����y���̶����y��픶���ӷ�ֵ��0.6��1mm�@3�N����������Ӌ���У��y�Uϵ�y��ӷ�����؈D1���M�����Ľ��档����m�������㣬���x���S������ָ�������£�x�S��������ָ�����������|����E��ʾ��x�Sؓ������ָ��������W��ʾ;y�S��ָ�������y�U�S��;z�S��ָ����ֱ���������Ľ��棬��D1��2��ʾ��
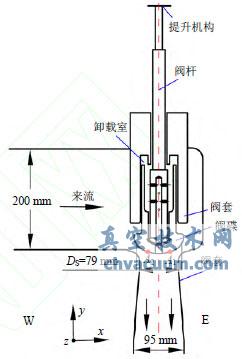
�D1 �{���y�Y���D
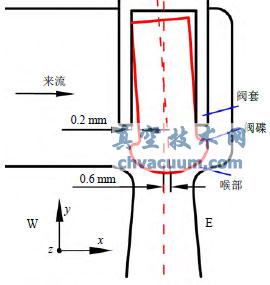
�D2 �y��ƫ������ʾ��D(h=0.6mm)
�����D2���y��픶�������h=0.6mm�r���y��ƫ��|��ʾ��D�����Կ����y�����ܳ��F����������Ҫ���y�����y�����g϶0.2mm�Q�����S��ʹ�Õr�g���ӣ��y�������Ϳ�Ӳ���Ó����g϶���_��0.4mm���˕r�y��픶������h=1mm������ж�d�҃����^������ռ��������С��1%����������Ӱ푿ɺ��Բ�Ӌ������ڄӾW��Ӌ���в����]��ж�d�����^�����w��
2����ֵӋ�㷽���̈́ӾW���O��
������������ģ�Ͳ���Fluent�л���realizablek-ε�ăɷ��̵�DESģ�͡�DES�����Y�������Zƽ���c��uģ�M���g�ă��c���ڽ�����ĸ���ӃȲ���RANS��������realizablek-ε�ɷ���ģ��ģ�M���е�С�߶��}���\��;���h�x����^������ģ�ͺ�ɢ��е������߶ȅ����þW��߶��cһ�����ij˷e���棬ʹ����Smagorinski��uģ�M�ā��������Z����ģ�͵����á��@�Ӽ����ڸ���ӃȰl�]ǰ��Ӌ����С�ă��c���ֿ������h�x����ą^��߶ȷ��x���������M���^�õ�ģ�M��
�����xȡ���H�\�к�ģ��������y�Uϵ�y����^��Ĺ��r������������(�{���y�Ľ^�������c���ֱ����ֵ)εL=11%������(�{���y�����o���c�M�ڿ����ı�ֵ)ψP=0.8����Ӌ�㹤�r���M���O�鿂��P0=123.5kPa���ضȞ�298K�������O���o������ֵP2=98.8kPa���ضȞ�295K�����xȡ��������ģ��������y��
�����Y��Fluent��UDF�����͏��ɹ��ģ�ͿɌ��F�y���ږ|���������Բ�ͬ������l�ʰ�������ӡ�UDF��������Ҫͨ�^ʽ(1)������ӡ�
cg_omega=Acos(BTime) (1)
����ʽ�У�cg_omega����xyƽ����D�ӽ��ٶȣ�����B�����l�ʣ�A������ӷ�ֵ��Fluent�Џ��ɹ�혷��ѾW���߅���뻯�鹝�c�g��B�ӵď��ɣ��W���Ƅ�ǰ���ɽM�ɵ�ϵ�y̎��ƽ���B���ھW��߅�繝�c�l��λ�ƺ��a���cλ�Ƴɱ����������Ķ������D�����W���c�Ƅӵľ��x�����ɹ�혷����������W���|������W����µ��Д����أ���ֻ�džμ��Č�߅���\�����酢���Uɢ��Ӌ�����У���˟o���ֵ���W���ؓ�ʼ�K��׃��
�����W����ICEM��������ȫ���������w�Y�����W���w�W��800�f���W��δ�l���Ƅӕr����ICEM�оW���|��2��u�r�˜����£�Determinant2´2´2>0.6���W��Ƕ�Angle>18°��ʹ��FluentӋ��r�����W���|��Determinant2´2´2>0.2�ҾW��Ƕ�Angle>9°�Ϳ��Դ_����ֵӋ������M�У��ɴ˿�Ҋ��ʼ�r�W���|���dz��ߡ��鱣�C�y���ڞ�������ͱ�������Įa�������y���ڼ��L������ֱ����10���������˺������y���·�����׃���^�鄡�ҵą^��W���C�ڴ˅^��ȾW�����׃����߅��Ӄ�y+<=5��
�����D3���ؖ|���������Ľ���W��;W��׃�κ�ľֲ�ʾ��D���ɈD3���Կ��������y�������^��W����ܣ��y���܇���һ�ӾW���Ȟ�0.004mm��������������̎�����y���ƄӘO��ʹ߅��ӾW���׃�^���ʹӋ��lɢ�����]��߅��Ӄ����ӌ������ľ�Ӱ푣�ͬ�r�鱣�o�y��̎߅��ӾW�������y�����օ^��W���O�Þ鄂�w�^������Ӌ�����@���־W��׃�Ρ����˅^����ľW���O�Þ�׃�΅^�������y���Ƅ����@���־W����a��������׃�Σ����w�^���׃�΅^��Ą�����D3��ʾ��ͨ�^���Ə��ɹ�혷��Ѓɂ����������ɳ��������c߅�繝�c�ɳ����ӣ����W�����^���׃�ο�����׃�΅^���п������w�^����������C�����y��̎�^�ܵľW�������׃���ɈD3���Կ��������y��픶�ƫ��|��1mm������W�]�аl����׃�����y��픶�ƫ��|��1mm�ľW��������ICEM�У���W���|���飺Determinant2´2´2>0.25���W��Ƕ�Angle>10°�����ԝM��FluentӋ���Ќ��W���Ҫ��ӾW�������{���y���_�����P�]Ӌ���У��˕r�����y��λ���^��ʹ�þW��׃�������鱣�C�W���ڴ�׃�κ��׃�ʵͲ����Ѳ�ȡ�^�ֵľW��߅��ӾW��ͨ���y�ԇ���M������ģ�͵���������С�������{���y��������������s�����S���������ӣ��־W��ͨ���y�Ծ��_�IJ��������������x��߅��Ӄȵ��T�����Ӽ�����������õĽY������ֻ�ܶ��Եķ����y�ȵ�������r�������ڔ�ֵӋ����������DES����ģ���m�����^���s�C���ĸ����Z�����x�����зdz��ߵ��A�y����������DES����ģ�߶ȵ���ه�W��߶ȡ��W���|����߅��ӃȵľW���á�ᘌ��y��С��������ԣ�����Fluent�Џ��ɹ��ģ�ͣ������ԵČ�߅��ӾW���w�������y���Ƅ���ɵľW��׃��“�D��”�������ߴ��^��ą^�Ȍ��F��800�f�Y���W��W��׃��Ҳ�M��������ģ�͌��W�������
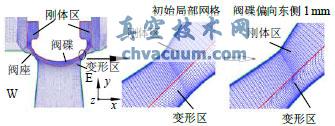
�D3 �ؖ|���������Ľ����ʼ�W��;ֲ��W��׃�ΈD
3����ֵӋ��Y��
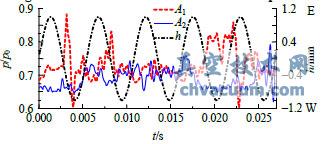
�������y���±�������ӵķ������O���˃ɂ��O�y�cA1��A2����λ����D1����ʾ���D4���y���oֹ��B�£��y���σɜy�c�S�r�g�ĉ���׃���r��D�����Կ����ɜy�c̎�ĉ����ʬF�oҎ�t�IJ��Ӡ�B���D5�͈D6���y�Uϵ�y���l��f=46.4Hz����y��픶�����քe��h=0.6mm��h=1mm�r���y����2���y�c�������ӕr��D��2�D���҂�ͬ�r�������y��λ�Ʒ����ɈD5���Կ������y��픶������0.6mm�r���y���ω����y�c�����ԳʬF�S�C��B����δ�ܵ��y���\�ӵ�Ӱ푡����ɈD6���Կ��������y��픶������1mm�r���y���O�y�c�������@���F���S�y��λ��׃���������Բ��ӬF���y���\�ӵ��|�ȕr��λ�ږ|�ȵıO�y�cA1�IJ������@����;���y���\�ӵ����ȕr��λ�����ȵıO�y�cA2�IJ������@����
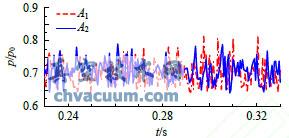
�D4 �ɱO�y�c�������ӕr��D(�y���̶�)
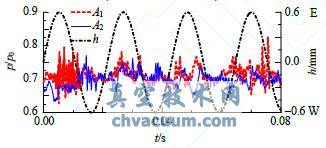
�D5 �ɱO�y�c�������ӕr��D(h=0.6mm��f=46.4Hz)
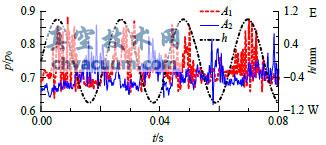
�D6 �ɱO�y�c�������ӕr��D(h=1mm��f=46.4Hz)
�����D7����Ӌ�����{���y���M�ڷ������Ľ��������N���͵����͡����Կ����ăɂȺ��������ĸ����������y���·��^��ij�cײ������������ӡ�������ײ�����������IJ�������ʹ�ú����Ժ������̎�ڲ���Ĕ[�Ӡ�B��ײ���cҲ���y���·������Ƅӡ�����ײ���γɵĸ߉��^�Ƅӵ��O�y�c�����r�͕����±O�y�c̎�����}�����ӡ����y��̎���oֹ��B�r���ɃɂȺ��������ĸ��������ď����ஔ�������������y���·�ײ�������F�����ǶȰl���^��ƫб�����ͣ�ײ��λ�������h�x�y���·��������y���O�y�c̎�������F���@�ĉ������ӡ������y���������ƫ��һ�ȕr(��D2���y��ƫ��|�Ȟ���)���������^���ĺ���̎�и�������w���^���˕r�����Ⱥ������������w���и���������Ƅ��ɖ|�Ⱥ��������ĸ�������ƫ��|�ȣ�ײ���cҲ�����ӽ��O�y�cA1̎������A1̎������������ͬ�Ӯ��y��ƫ�����ȕr����������ײ���cλ��Ҳ���D�Ƶ�A2����������A2�ĉ�������Ҳ���������ӡ�
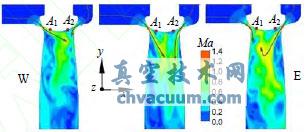
�D7 �{���y���M��������Ma�D
�����ɈD4—6���Կ��������y��픶˵����С�ڵ���0.6mm�r����ֵģ�M���{���y�����ӿ��Բ����]�y�Uϵ�y��ӌ�������Ӱ푡������y��픶�����_��1mm�r���y�ȵ��������@�ܵ��y�Uϵ�y��ӵ�Ӱ푣��˕r회�����Կ��]���y��픶������Ҫ���y�����y�����g϶�Q�������@һ�g϶����r���y�Uϵ�y����Ӿ͕������{���y�����������Բ��ӣ��γ����������ӣ��@�N��������������{�{���y�İ�ȫ��
�����D8�͈D9���y��픶������h=1mm������l�ʷքe��f=92.8Hz��f=185.6Hz�r���y���ɜy�c�������ӕr��D�����y�Uϵ�y����92.8Hz��ӕr���ɜy�c�����}�����S�y��λ�������@������׃���������������ѳ��F�˜���F������185.6Hz��ӕr���y���y�c̎�m���F���^����ȵĉ����}�ӣ�����λ���ћ]�����@�����ڌ����Pϵ���@�����ڃɂȸ��������Ĕ[�Ӵ��ڑT�ԣ��S������l�ʵ����Ӄɂ������y�Լ��r���S�y��һ���\�ӣ������ڱO�y�c̎Ҳ�����ʬF���@���S�y���Ƅӵĉ������ӡ�
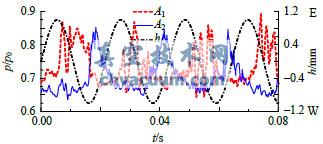
�D8 �ɱO�y�c�������ӕr��D(h=1mm��f=92.8Hz)
�D9 �ɱO�y�c�������ӕr��D(h=1mm��f=185.6Hz)
4���YՓ
������������FLUNT�ЄӾW��ģ�ͺ�UDF���������]���y���ڲ�ͬ��ӷ�ֵ������l�����y��������Ӱ푣��õ����½YՓ��
����1)�ڄӾW��׃���У���ȡ�̶��y��߅���̎�����ľW��ʹ�W���ڳ߶������^���λ���Ƅ�׃�Ρ������������ӾW��׃��������߅��ӾW���׃�^������µ�Ӌ��lɢ���@�N���|���ľW��׃���������{���y�����ÄӾW��ģ�M�y���Ƅӌ��y��������Ӱ�����Ҫ���x��
����2)�ӾW��Ӌ��������y��픶���ӷ�ֵС�ڵ���0.6mm�r���y���ω������Ӟ��S�C����;���y��픶���ӷ�ֵ�_��1mm�r���y���ω������ӳʬF�S�y��λ��������׃�������c���˕r��ֵӋ���Б����]���y�Uϵ�y��ӌ�������Ӱ푡�
����3)�S���y�Uϵ�y����l�ʵ����ӣ�������������׃�����ڑT�ԣ��y���ϵĉ��������S�y��λ�Ƴ��F����F��ֱ�������Բ�����ʧ����ֵģ�M���y�Uϵ�y���ղ�ͬ���������l�ʌ��y��������Ӱ푣������m��ֵģ�M���Ƿ]��ӌ��y��������Ӱ��ṩ�˅�����